
















































 选择语言
选择语言
< 返回菜单












解决方案






户用电站解决方案
户用光伏电站解决方案主要是针对住宅屋顶(包括农户屋顶、别墅、阳光房、小区等),常见的装机容量一般在3~50kW之间,通过220/380V电压等级接入公共电网。九游j9户用解决方案兼具高效发电、安全可靠、智能运维等特点,为户用投资商、安装商、代理商提供一站式省心服务。
工商业电站解决方案
工商业屋顶不仅包括厂房屋顶、商超、办公楼宇等标准工商业屋顶,还包括党政机关(政府大楼、法院等)、公共建筑屋顶(学院、医院、村委、车站等)以及一些“光伏+”的应用场景;工商业屋顶面积大,用户用电量大且电价相对较高,投资回报更加可观,同时企业能够使用绿色电力,起到了节能减排、绿色环保的功效。九游j9工商业解决方案带来“更高收益、更低投资、安全可靠、智能运维”的客户价值,覆盖上述工商业全场景的应用。
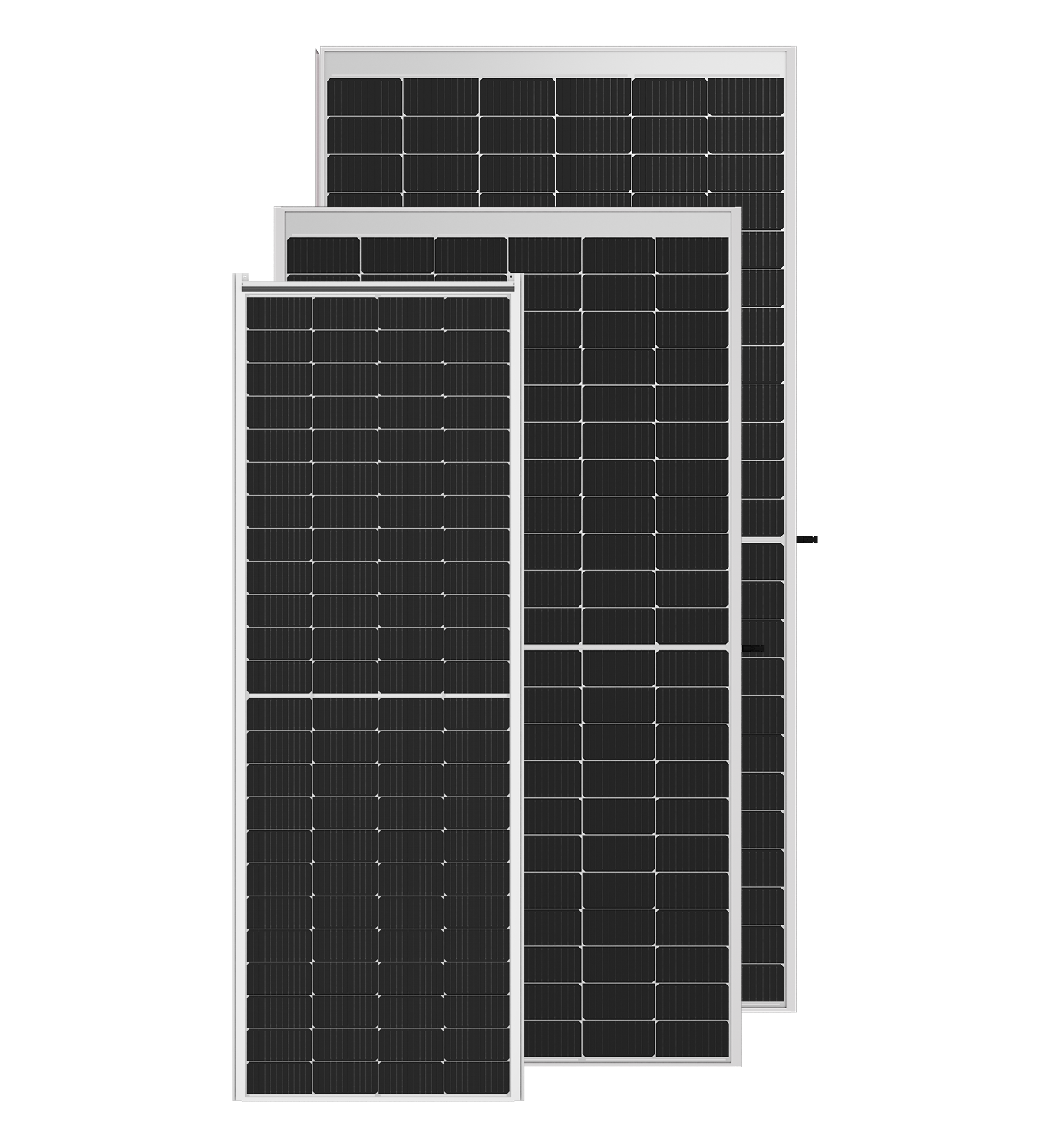
地面电站解决方案
地面电站包括平地、山地、丘陵、农光互补、沙漠治理、土壤修复、水面等多种应用场景,容量一般在20MW以上,九游j9设备能够在高温、高海拔、风沙、盐雾和低温等恶劣运行环境下稳定高效运行;同时九游j9地面解决方案通过创新举措,有效合理的降低初始投资和运维成本,提升系统发电量和运维效率,实现了电站投资者和运营方客户价值最大化。

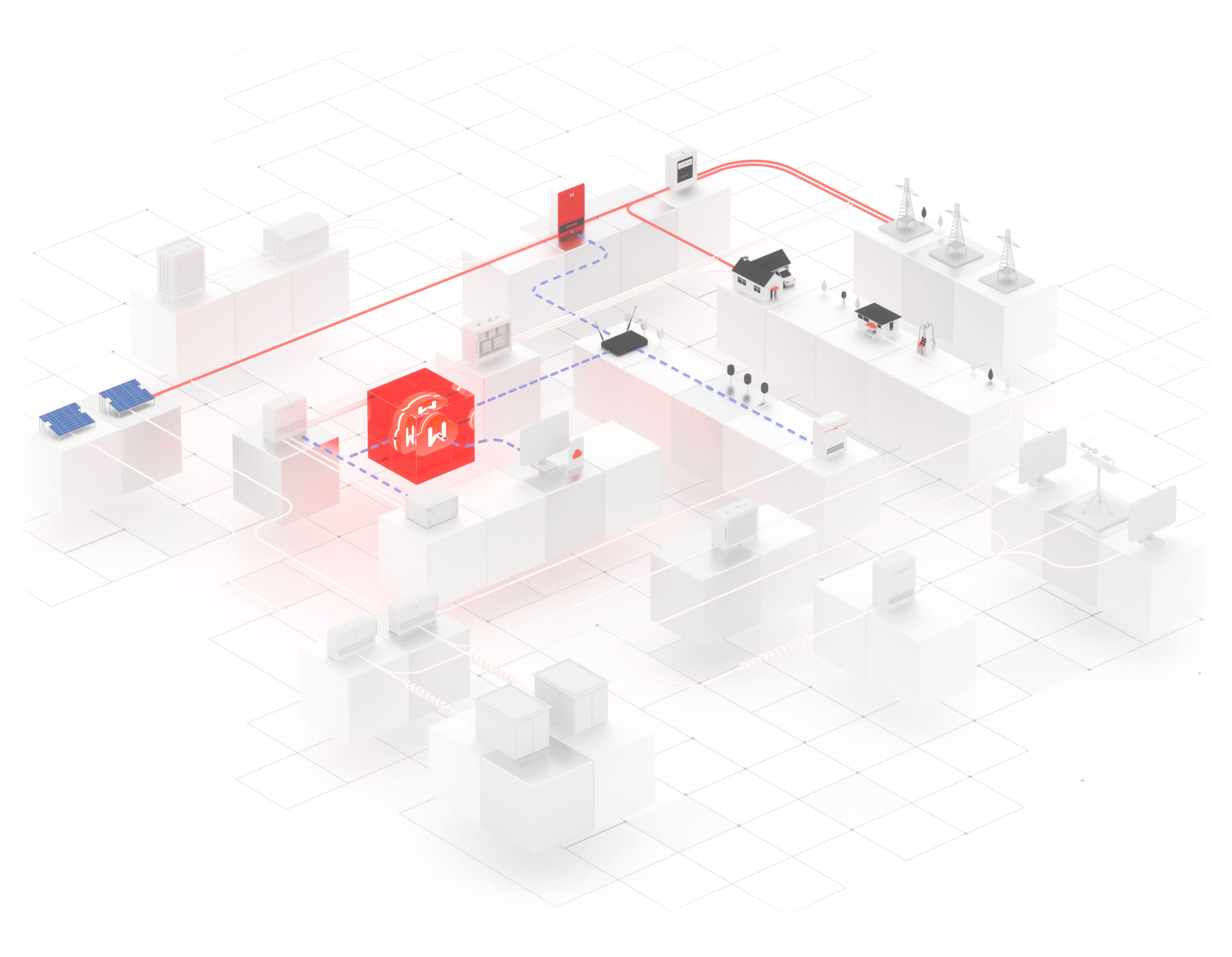
户用光储解决方案
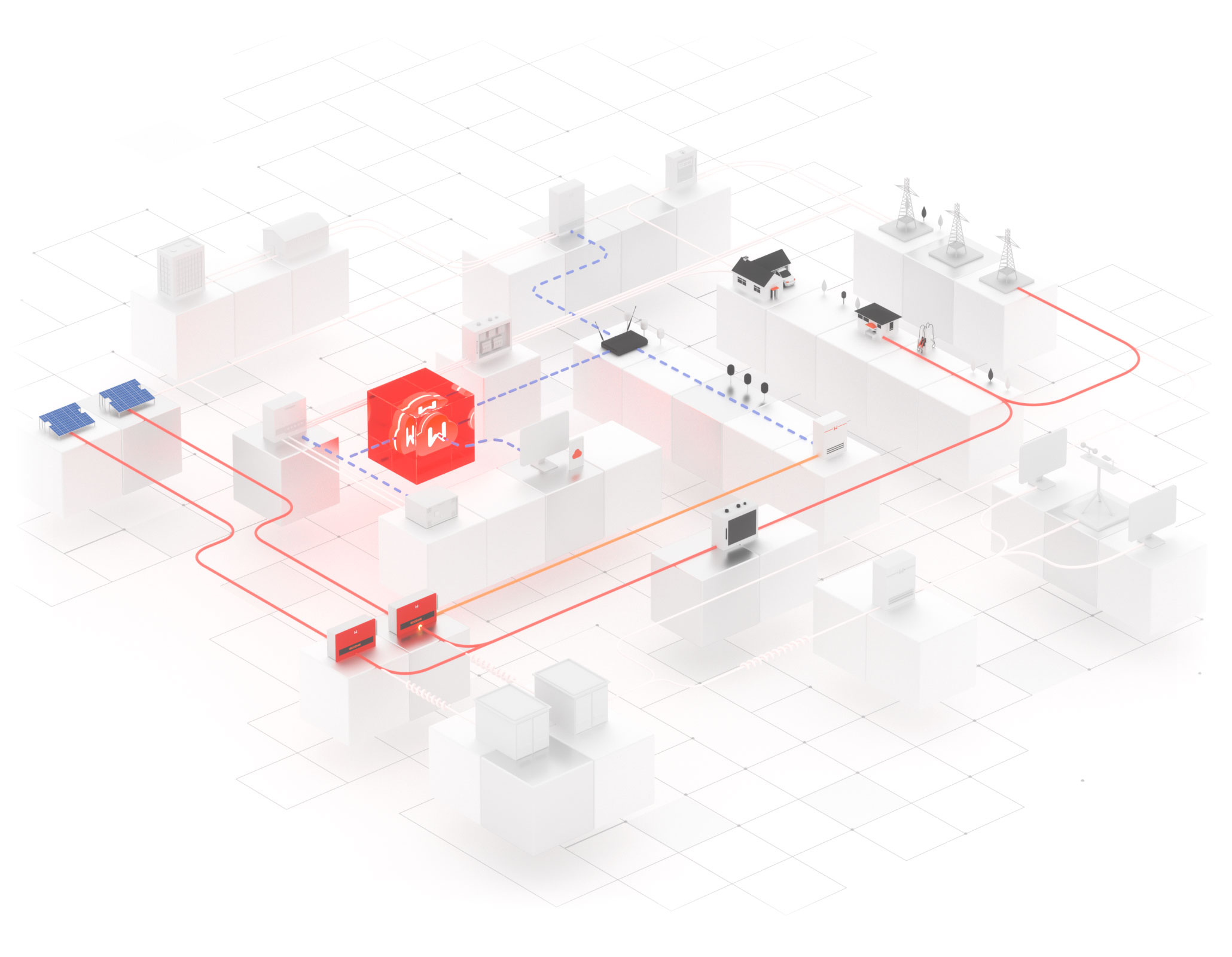
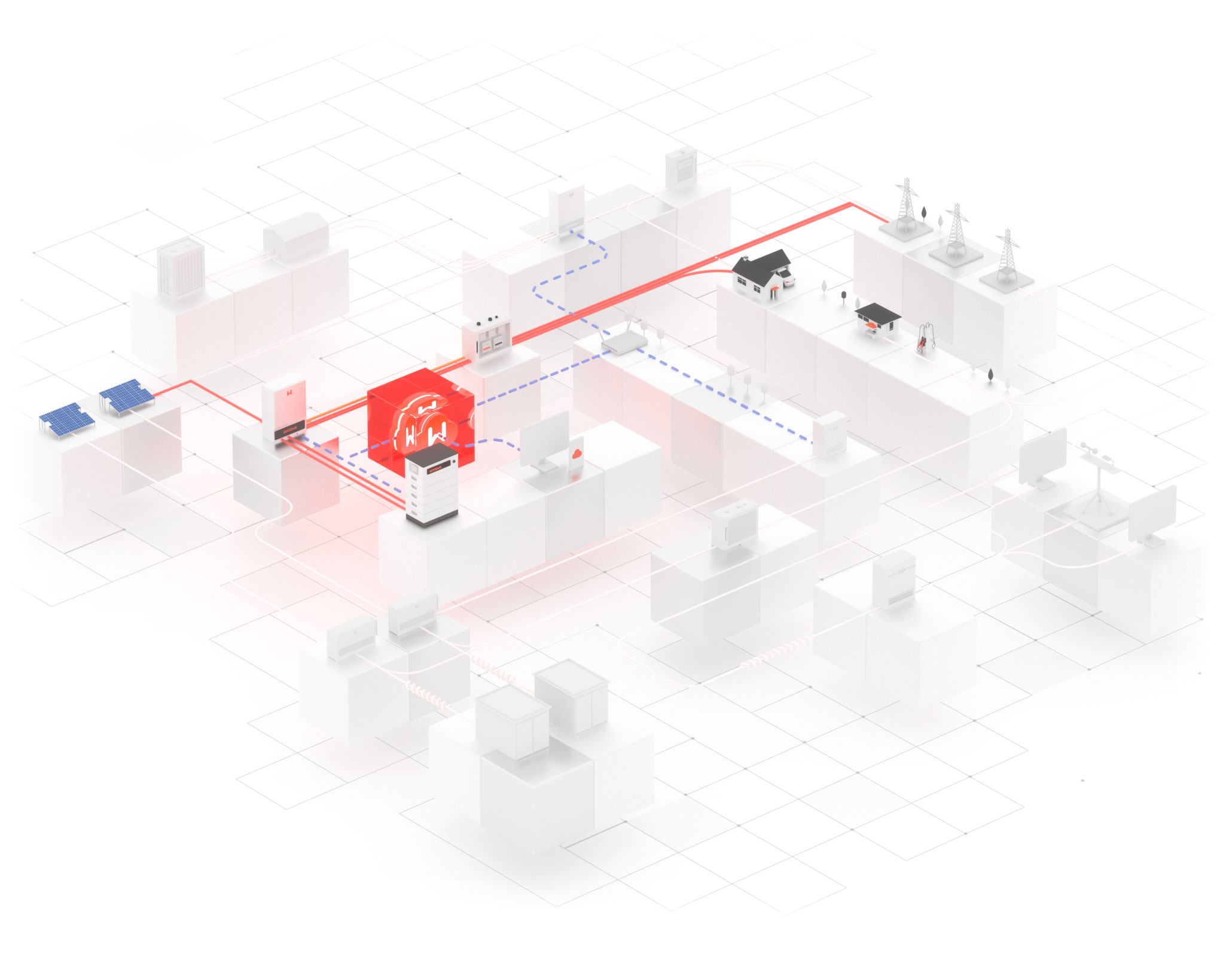
九游j9户用储能解决方案包括“储能逆变器+电池”成套解决方案,具备多款储能逆变器和电池产品,适用于新建光储电站、原有户用并网系统改造或无(弱)电网地区。九游j9户用储能解决方案实现绿电更高比例的自用,减少电费支出;还可以提供UPS电源,保障关键设备不停电;用户通过九游j9云监控轻松掌握电站情况,尽享零碳生活。

新闻动态